 播面
播面 Python 的字典(Dictionary)底层实现原理(哈希表)
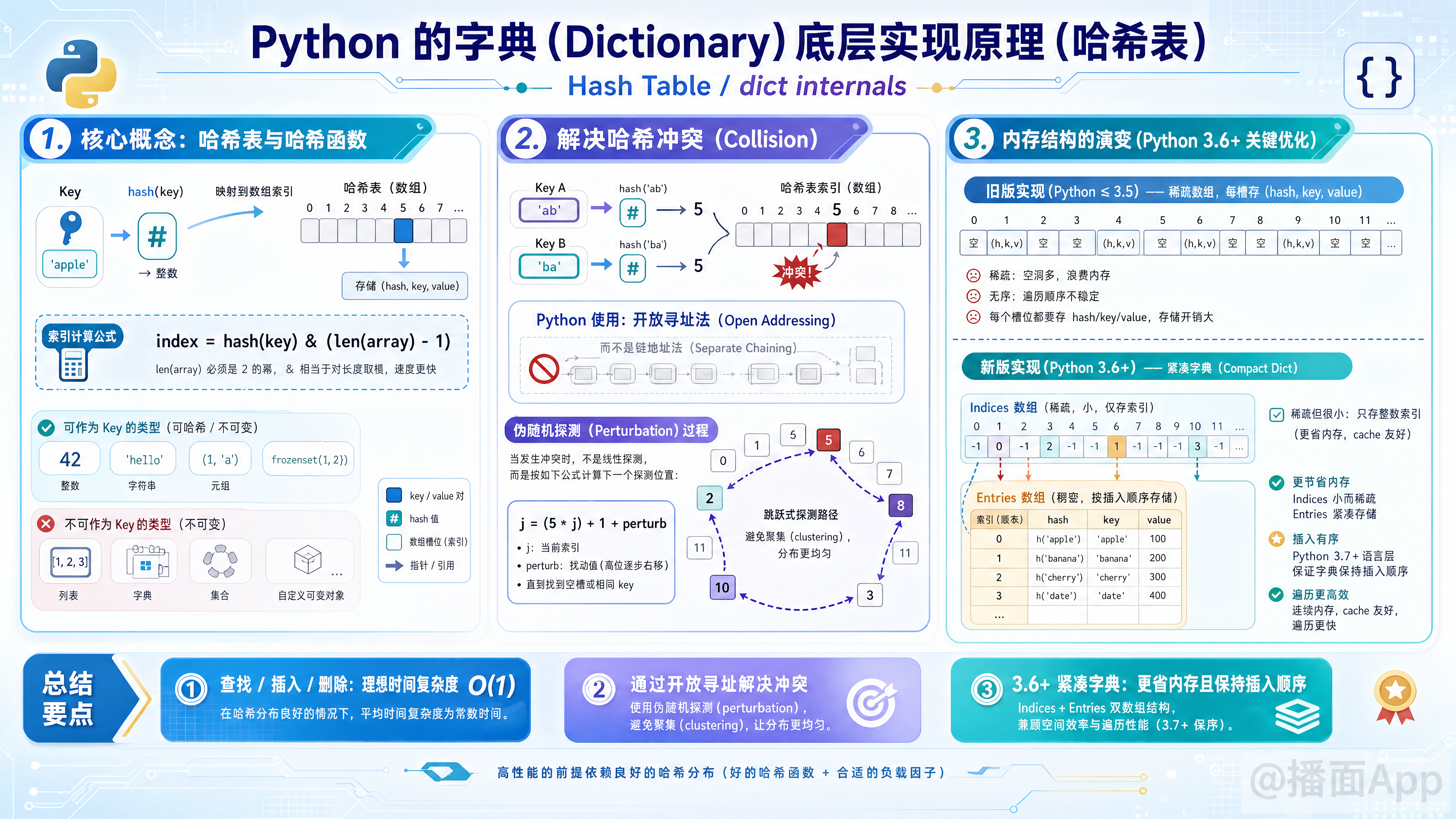
Python 的字典(dict)是 Python 中最重要、最常用的数据结构之一。它的底层实现基于 哈希表(Hash Table),这使得字典在理想情况下的查找、插入和删除操作的时间复杂度都为 O(1)。
然而,Python 对哈希表的实现经过了多次优化(特别是 Python 3.6 之后)。下面我将深入浅出地解析其底层原理。
1. 核心概念:哈希表与哈希函数
字典本质上是一个数组(在内存中是连续的空间),通过 哈希函数 将“键(Key)”映射到数组的“索引(Index)”上。
哈希函数(Hash Function):
- 当你执行
d['name'] = 'Alice'时,Python 首先计算'name'的哈希值:hash('name')。 - 得到一个整数(例如
-909234...)。 - 要求: 字典的 Key 必须是不可变类型(可哈希),如整数、字符串、元组;列表和字典不能作为 Key。
- 当你执行
计算索引:
- 哈希值通常很大,不能直接作为数组下标。Python 通过取模运算(位运算优化)将哈希值映射到数组的大小范围内。
- 公式大致为:
index = hash(key) & (len(array) - 1)。
2. 解决哈希冲突(Collision)
当两个不同的 Key 计算出的索引位置相同时,就发生了哈希冲突。
Python 使用 开放寻址法(Open Addressing) 来解决冲突,而不是链地址法(Linked List,如 Java 的 HashMap)。
- 工作原理:
- 如果计算出的位置
i已经被占用了,Python 就会按照特定的规则探测下一个位置j。 - 如果
j也被占用,继续探测k,直到找到一个空位。
- 如果计算出的位置
- 探测算法:
- Python 并不是简单的“线性探测”(即
i+1, i+2...),因为这会导致数据聚集(Clustering)。 - Python 使用一种伪随机探测序列(
j = (5 * j) + 1 + perturb),让数据在数组中分布得更均匀。
- Python 并不是简单的“线性探测”(即
3. 内存结构的演变(关键点)
这是面试或深入理解时的加分项。Python 3.6 对字典的内存结构进行了重构,使其更紧凑且有序。
A. Python 3.6 之前(稀疏数组,无序)
在老版本中,字典是一个巨大的结构体数组(Entry Array)。每个槽位(Slot)存储三个信息:哈希值、Key 指针、Value 指针。
plaintext
# 示意图:一个大小为 8 的旧版字典
[
[hash1, ptr_key1, ptr_val1], # 索引 0
[null, null, null ], # 索引 1 (空)
[null, null, null ], # 索引 2 (空)
[hash2, ptr_key2, ptr_val2], # 索引 3
...
]- 缺点: 空间浪费严重。为了减少冲突,哈希表必须保持大约 1/3 的空闲空间。由于每个槽位都很大(存了3个值),这些空槽位浪费了大量内存。
- 无序: 遍历是按照物理内存顺序进行的,因为插入时位置是跳跃的,所以遍历结果看起来是无序的。
B. Python 3.6 及之后(紧凑数组,有序)
新版实现将数据结构拆分为两个数组:索引数组(Indices) 和 实体数组(Entries)。
- Indices(稀疏,但很小): 只存储整数(指向 Entries 的下标)。
- Entries(稠密,按插入顺序): 存储真正的
(hash, key, value),并且是紧密排列的,没有空洞。
示例: d = {'name': 'Alice', 'age': 18}
Entries 数组(存数据):
plaintext
Entries = [
0: [hash_name, 'name', 'Alice'], # 第一次插入
1: [hash_age, 'age', 18 ] # 第二次插入
]Indices 数组(存哈希表逻辑):
假设 'name' 哈希取模后是 2,'age' 哈希取模后是 5。
plaintext
Indices = [None, None, 0, None, None, 5, None, ...]
# 索引 2 的位置存的是 0 -> 代表去 Entries[0] 找数据
# 索引 5 的位置存的是 1 -> 代表去 Entries[1] 找数据- 优点 1(省内存):
Indices数组只存简单的整数(如 1 字节或 2 字节),即使有空洞,浪费的空间也非常小。Entries数组是紧凑的,没有空洞。相比老版本,内存占用减少了约 20%-25%。 - 优点 2(有序): 当我们遍历字典时,直接遍历
Entries数组。因为Entries是严格按照插入顺序追加数据的,所以Python 3.7+ 正式宣布字典是有序的。
4. 扩容机制(Resizing)
为了保证查找效率,哈希表不能太满。Python 使用 负载因子(Load Factor) 来决定何时扩容。
- 触发条件: 当字典中已使用的元素数量达到总容量的 2/3 时,Python 会自动扩容。
- 扩容过程:
- 申请一块更大的内存(通常是原来的 2 倍或 4 倍)。
- Rehashing: 所有的键值对都需要重新计算索引,并搬运到新的表中(因为数组长度变了,取模的结果
hash & (new_size - 1)也会变)。 - 这是一个耗时操作(O(N)),所以应尽量避免频繁扩容。
5. 字典操作流程总结
查找流程 (value = d[key]):
- 计算
h = hash(key)。 - 计算索引
ix = h & (size - 1)。 - 查看
Indices[ix]:- 如果是
None-> KeyError。 - 如果有值
loc-> 去Entries[loc]检查。
- 如果是
- 检查
Entries[loc]中的stored_hash是否等于h且stored_key是否等于key:- 如果相等 -> 返回 Value。
- 如果不相等(哈希冲突) -> 按照探测规则修改
ix,回到步骤 3。
删除流程 (del d[key]):
Python 的字典删除并不是物理删除,而是伪删除。
- 在
Indices数组中,将对应的位置标记为DUMMY(一个特殊的占位符)。 - 这是为了保证探测链不断裂(如果直接设为 None,处于冲突链后方的元素就找不到了)。
- 只有在扩容或重建字典时,这些
DUMMY才会真正被清理掉。
总结
- 底层结构: 哈希表。
- 冲突解决: 开放寻址法(伪随机探测)。
- 关键优化(Python 3.6+): 分离了“索引数组”和“实体数组”。
- Indices: 稀疏,存下标,负责哈希映射。
- Entries: 稠密,存数据,负责存储和保持顺序。
- 特性: 查找快(O(1))、空间换时间、Key 必须可哈希、Python 3.7+ 保证有序。