 播面
播面 std::map 和 std::unordered_map 的区别是什么?
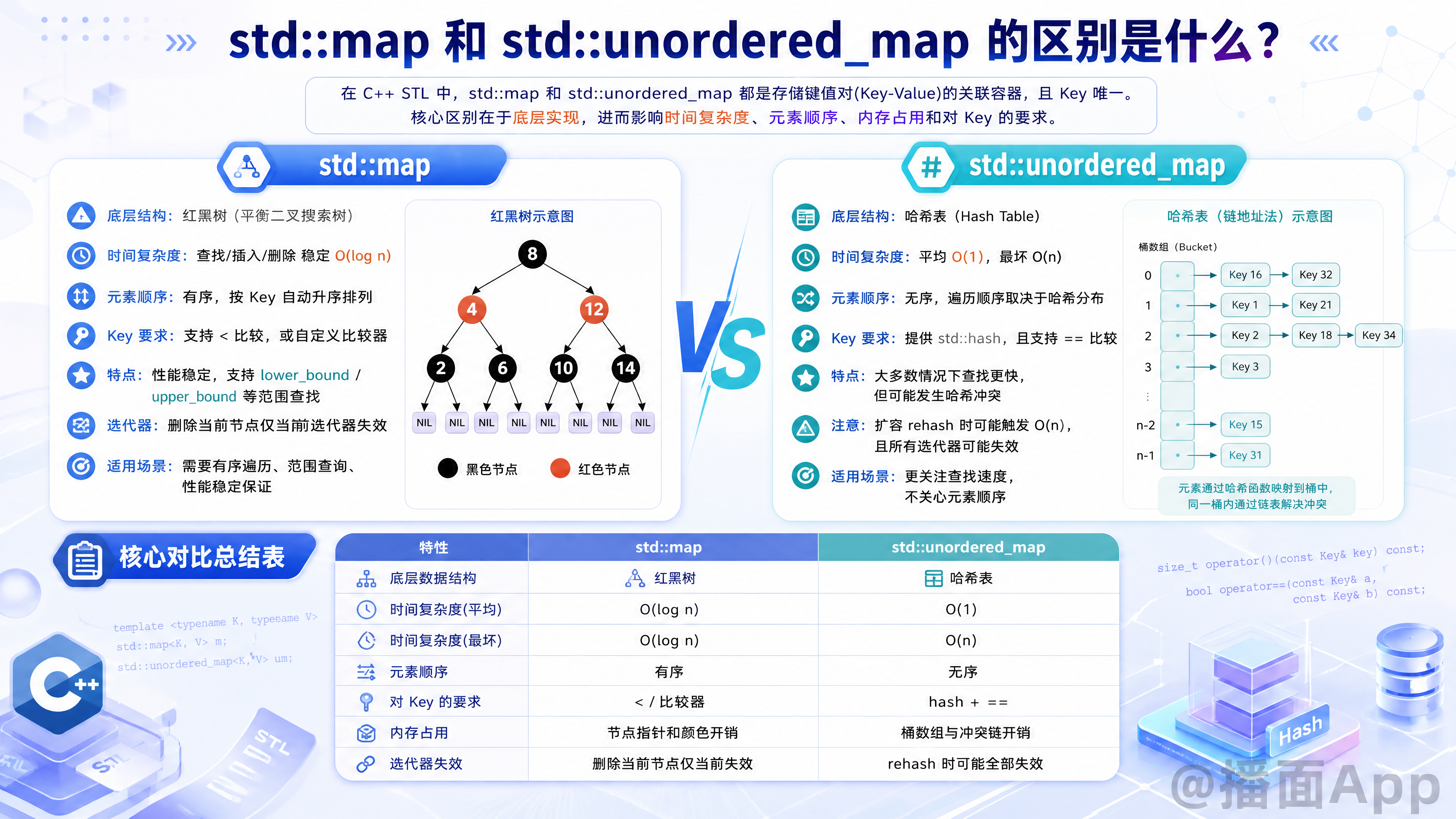
在 C++ 标准模板库 (STL) 中,std::map 和 std::unordered_map 都是用于存储键值对 (Key-Value) 的关联容器,并且都要求键 (Key) 是唯一的。
它们的核心区别在于底层实现,这直接决定了它们在时间复杂度、元素顺序、内存占用以及对 Key 的要求上的差异。
以下是详细的对比:
1. 核心对比总结表
| 特性 | std::map |
std::unordered_map (C++11引入) |
|---|---|---|
| 底层数据结构 | 红黑树 (平衡二叉搜索树) | 哈希表 (Hash Table) |
| 时间复杂度 (平均) | 查找/插入/删除: | 查找/插入/删除: |
| 时间复杂度 (最坏) | 查找/插入/删除: | 查找/插入/删除: (发生严重哈希冲突时) |
| 元素顺序 | 有序 (按 Key 自动升序排序) | 无序 (随机,取决于哈希函数) |
| 对 Key 的要求 | 必须重载 < 运算符 (或提供比较器) |
必须提供 std::hash 函数,且重载 == 运算符 |
| 内存占用 | 较高 (每个节点需要存父/子节点指针和颜色) | 相对较高 (需要维护哈希桶数组和链表指针) |
| 迭代器失效 | 删除当前节点只失效当前迭代器 | rehash (扩容) 时,所有迭代器可能失效 |
2. 详细区别解析
(1) 底层数据结构
std::map:底层通常是一棵红黑树。红黑树是一种自平衡二叉查找树,它保证了树的高度始终保持在 级别,因此所有的操作都能在对数时间内完成。std::unordered_map:底层是一个哈希表(通常采用“链地址法”解决哈希冲突)。它通过哈希函数将 Key 映射到一个桶 (bucket) 中。如果多个 Key 映射到同一个桶,就会形成链表。
(2) 时间复杂度与性能
std::map:性能极其稳定。无论数据是什么样,查找、插入、删除的时间复杂度严格保证为 。std::unordered_map:大多数情况下极快,平均时间复杂度为 。但是,如果哈希函数设计得很差,或者数据极其特殊导致大量哈希冲突(所有元素挤在一个桶里),最坏时间复杂度会退化成 。此外,当元素数量超过负载因子时,哈希表会触发扩容 (rehash),这是一个耗时 的操作。
(3) 元素的顺序
std::map:当你遍历map时,输出的元素是严格按照 Key 排序(默认升序)的。它支持lower_bound和upper_bound等范围查找操作。std::unordered_map:内部毫无顺序可言。遍历输出的顺序和插入顺序无关,并且在发生rehash之后,原本的顺序可能会完全被打乱。
(4) 对 Key 类型(自定义类型)的要求
std::map:如果是自定义的结构体或类作为 Key,你必须重载operator<,或者在模板参数中传入一个自定义的比较函数。因为它需要比较大小来建树。cppstruct Point { int x, y; }; bool operator<(const Point& a, const Point& b) { return a.x < b.x || (a.x == b.x && a.y < b.y); } std::map<Point, int> myMap; // OKstd::unordered_map:如果是自定义类型作为 Key,你必须为其提供一个哈希函数 (std::hash),并且重载operator==(因为要在同一个桶内的链表中寻找完全相同的元素)。这比map的要求繁琐得多。
3. 如何选择?(使用场景建议)
优先选择 std::unordered_map,除非你有特殊需求。
选择
std::unordered_map的场景:- 你只需要纯粹的键值对映射(查找、插入、删除)。
- 速度是第一优先级(尤其是处理海量数据且不需要排序时)。
- 绝大多数刷算法题(如 LeetCode 中的 Two Sum)、业务代码中的缓存、字典查找等场景,默认都应该用它。
选择
std::map的场景:- 你需要按顺序遍历元素(例如:输出排行榜、按时间戳顺序处理事件)。
- 你需要查找某个范围的元素(例如:查找大于且最接近
X的元素,使用map.lower_bound(X))。 - 你希望性能具有绝对的稳定性,不能容忍
unordered_map扩容 (rehash) 带来的偶尔卡顿(在严苛的实时系统中)。 - 你的 Key 是复杂的自定义结构体,写一个
<运算符比写一个极其复杂的哈希函数要简单和安全得多。