ConcurrentHashMap实现原理
本文详解ConcurrentHashMap:JDK 1.7用分段锁提高并发,锁粒度为Segment;JDK 1.8则采用CAS+synchronized锁住哈希桶头节点,粒度更细,性能更优,并通过引入红黑树优化查询。
我们来深入浅出地讲解一下 ConcurrentHashMap 的工作原理。这部分内容通常会涉及其在 JDK 1.7 和 JDK 1.8+ 两个重要版本中的不同实现,因为 1.8 版本做出了革命性的改进。
核心思想:如何保证线程安全并提升性能?
在 ConcurrentHashMap 出现之前,我们通常使用 Hashtable 来实现线程安全的 Map。Hashtable 的做法非常简单粗暴:给所有公共方法(如 put, get, remove)都加上 synchronized 关键字。
- 优点:简单,绝对线程安全。
- 缺点:性能极差。
synchronized锁住了整个对象 (this),意味着任何时候只有一个线程能访问这个 Map。如果一个线程在进行写操作(可能耗时较长),其他所有线程(即使是读操作)都必须等待。这被称为全局锁或表锁,锁的粒度太大了。
ConcurrentHashMap 的核心思想就是 “降低锁的粒度”,允许多个线程同时对 Map 的不同部分进行操作,从而大大提高并发性能。
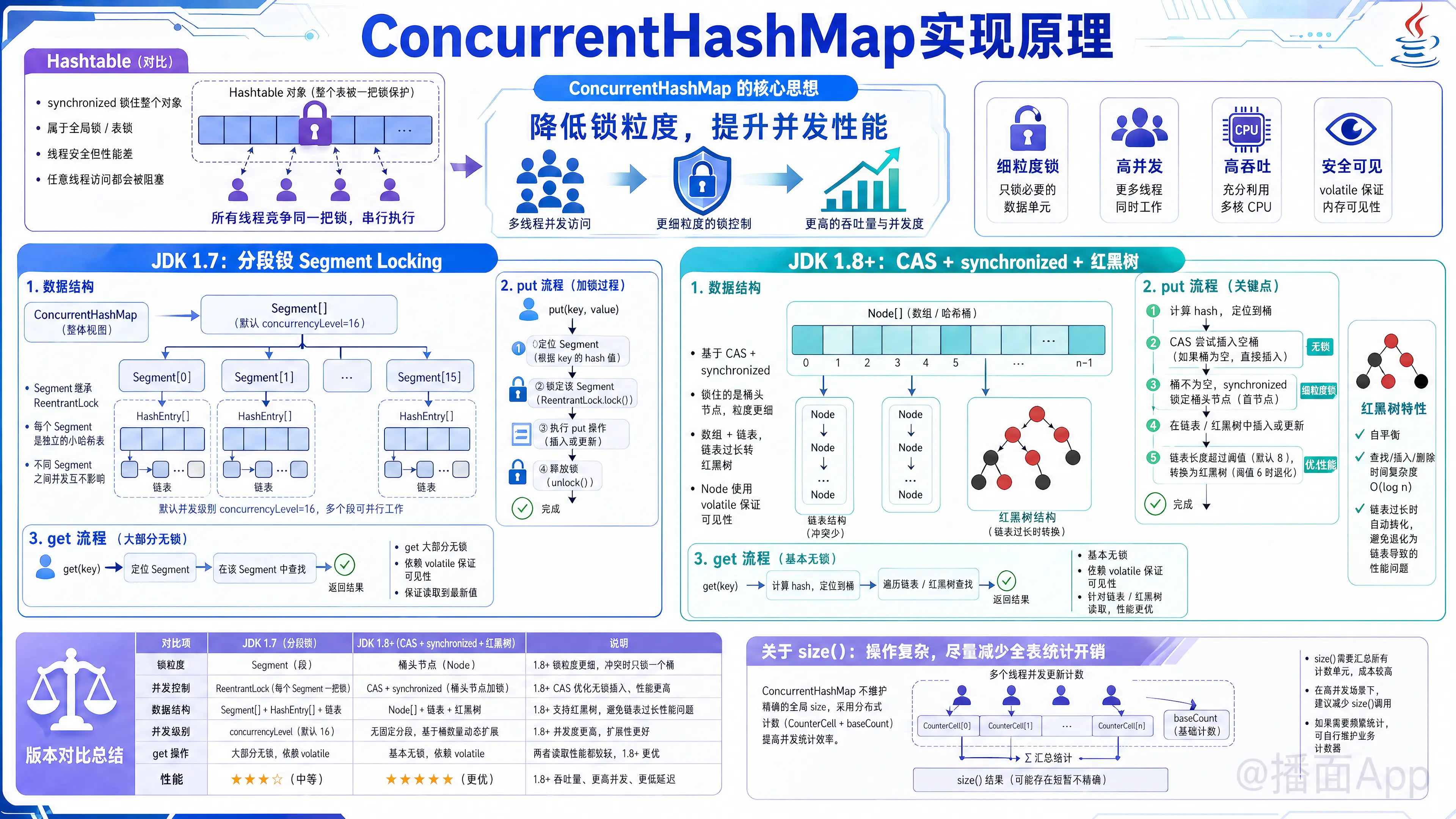
JDK 1.7 的实现原理:分段锁 (Segment Locking)
在 JDK 1.7 版本中,ConcurrentHashMap 采用了一种叫做“分段锁”的巧妙设计。
1. 数据结构
它将整个哈希表在逻辑上分成了多个段 (Segment)。其内部结构如下:
- 一个
ConcurrentHashMap包含一个Segment[]数组。 - 每个
Segment都是一个独立的小型哈希表,它继承自ReentrantLock,自带锁的功能。 - 每个
Segment内部包含一个HashEntry[]数组,HashEntry存储了键值对,并通过链表解决哈希冲突。
可以把它想象成:一个 ConcurrentHashMap 里面有多个小 Hashtable。
2. 工作流程
初始化:
- 在创建
ConcurrentHashMap时,可以指定一个concurrencyLevel(并发级别,默认为 16)。 - 程序会根据这个级别初始化相应数量的
Segment。每个Segment都是一个独立的锁。
- 在创建
put操作:- 定位 Segment:根据 key 的
hashCode()计算出它应该属于哪个Segment。 - 锁定 Segment:对该
Segment加锁 (lock())。注意:此时只锁定了这一个Segment,其他Segment不受影响,其他线程仍然可以访问它们。 - 执行 put:在当前
Segment内部进行put操作,这与HashMap的过程类似(计算哈希值、找到HashEntry数组中的位置、处理哈希冲突等)。 - 释放锁:操作完成后,释放
Segment的锁 (unlock())。
- 定位 Segment:根据 key 的
get操作:get操作大部分情况下是无锁的,因此速度非常快。- 它利用了
volatile关键字来保证内存可见性。Segment内部的HashEntry数组和HashEntry的value字段都是用volatile修饰的。 - 这确保了当一个线程修改了某个
value后,其他线程能立刻看到这个更新,无需加锁。
size()操作:- 这是一个比较复杂的操作。要计算全局大小,不能简单地把每个
Segment的大小加起来,因为在相加的过程中,某个Segment的大小可能又变化了。 - 它的策略是:先尝试不加锁,循环两次计算所有
Segment的modCount(修改次数) 之和。如果在两次计算期间,modCount没变,说明没有发生修改,结果是准确的。 - 如果
modCount变了,说明有线程在修改,这时它会依次锁住所有的Segment,然后计算总大小,最后释放所有锁。
- 这是一个比较复杂的操作。要计算全局大小,不能简单地把每个
3. 优缺点
- 优点:通过分段锁,大大提高了并发度。理论上,最大并发度就是
Segment的数量。 - 缺点:
- 分段锁的设计相对复杂,占用的内存也更多。
size()操作的代价较大。- 并发级别在初始化后就固定了,无法动态调整。
JDK 1.8+ 的实现原理:CAS + synchronized
到了 JDK 1.8,ConcurrentHashMap 的实现被完全重写,放弃了 Segment 的设计,转而采用了一种更细粒度的锁机制。
1. 数据结构
JDK 1.8 的 ConcurrentHashMap 结构与 HashMap 在 1.8 中的实现非常相似:
Node[]数组:一个volatile修饰的Node数组 (table),作为哈希桶。Node:存储键值对的基本单位。当哈希冲突发生时,Node会形成一个链表。TreeNode:当某个哈希桶中的链表长度超过一个阈值 (默认为 8),并且数组总长度大于 64 时,链表会转化为红黑树,以提高查询效率。
2. 工作流程
它摒弃了分段锁,而是采用了 CAS (Compare-And-Swap) 和 synchronized 结合的方式来保证线程安全。锁的粒度被缩小到了哈希桶的头节点。
put操作:- 计算哈希值:根据 key 计算出在
Node[]数组中的索引位置。 - 检查该位置是否为空:
- 如果该位置为
null,说明没有哈希冲突。它会使用 CAS 操作尝试将新的Node放置到这个位置。 - 如果 CAS 成功,说明插入完成。
- 如果 CAS 失败,说明有其他线程抢先一步占用了这个位置,此时会进入下一步(自旋或锁)。
- 如果该位置为
- 处理哈希冲突:
- 如果该位置不为
null,说明发生了哈希冲突。 - 此时,它会使用
synchronized锁住该位置的头节点(链表或红黑树的第一个节点)。 - 注意:锁住的只是这个桶的头节点,而不是整个 Map。其他线程仍然可以并发地访问其他桶。
- 在
synchronized代码块内部,遍历链表或红黑树,判断是更新已有 key 的值还是在末尾追加新节点。
- 如果该位置不为
- 计算哈希值:根据 key 计算出在
get操作:- 与 1.7 类似,
get操作也是无锁的。 Node数组和Node的val及next字段都用volatile修饰,保证了多线程环境下的内存可见性。直接读取即可。
- 与 1.7 类似,
size()操作:- 1.8 中对
size()的计算也做了优化。它不再是实时精确的,而是“近似值”。 - 它通过一个
baseCount变量和一个CounterCell[]数组来协同计数。 - 在没有并发竞争时,直接通过 CAS 更新
baseCount。 - 当并发竞争激烈,CAS 更新
baseCount失败时,线程会把计数分散到CounterCell数组的不同槽位上。 size()方法最终返回的是baseCount和所有CounterCell中值的总和。这个值在没有并发修改时是精确的,但在高并发时是一个估算值。
- 1.8 中对
3. 优缺点
- 优点:
- 锁的粒度更细,只锁住冲突的哈希桶头节点,而不是整个
Segment,并发性能更高。 - 数据结构更简单,内存占用更少。
- 引入红黑树,解决了哈希冲突严重时链表过长导致的性能下降问题。
- 锁的粒度更细,只锁住冲突的哈希桶头节点,而不是整个
- 缺点:
- 实现非常复杂,需要深入理解
volatile, CAS 和synchronized的底层原理。 size()方法返回的是一个估算值,不保证绝对精确。
- 实现非常复杂,需要深入理解
总结与对比:JDK 1.7 vs JDK 1.8
| 特性 | JDK 1.7 (分段锁) | JDK 1.8 (CAS + synchronized) |
|---|---|---|
| 底层结构 | Segment[] + HashEntry[] |
volatile Node[] + 链表/红黑树 |
| 锁机制 | ReentrantLock 锁住整个 Segment |
synchronized 锁住桶的头节点 + CAS |
| 锁粒度 | Segment 级别(较粗) |
哈希桶级别(更细) |
get 操作 |
volatile 读取,无锁 |
volatile 读取,无锁 |
size() 计算 |
复杂,高并发时可能锁住所有Segment |
baseCount + CounterCell,高效,但为估算值 |
| 并发度 | 取决于 Segment 数量,固定 |
理论上是哈希桶的数量,动态 |
| 性能 | 良好 | 更优,尤其是在高并发场景 |
总而言之,ConcurrentHashMap 的演进过程,就是一部锁优化史:从 Hashtable 的全局锁,到 JDK 1.7 的分段锁,再到 JDK 1.8 的更细粒度的 CAS + 节点锁,其目标始终是尽可能地减少锁的范围,从而最大化并发性能。 在现代 Java 开发中,ConcurrentHashMap 是处理高并发键值存储场景的首选。
其中刚才提到的
检查该位置是否为空:
- 如果该位置为
null,说明没有哈希冲突。它会使用 CAS 操作尝试将新的 Node 放置到这个位置。- 如果 CAS 成功,说明插入完成。
- 如果 CAS 失败,说明有其他线程抢先一步占用了这个位置,此时会进入下一步(自旋或锁)。
这个过程是 ConcurrentHashMap 高性能的关键之一,因为它是一种乐观的、无锁的尝试。
一、 什么是 CAS (Compare-And-Swap)?
CAS,即“比较并交换”,是一个原子操作。它不是 Java 语言层面的东西,而是由 CPU 指令直接支持的。正因为是硬件级别的原子操作,所以它能保证在多线程环境下的正确性,而不需要操作系统的锁介入。
CAS 操作包含三个核心参数:
- V (Variable/Memory Location):要被修改的内存地址中的值。
- E (Expected Value):你期望这个内存地址中当前的值。
- N (New Value):如果内存地址中的值确实和你期望的一样,那么就把它更新为这个新值。
操作逻辑可以描述为:
“我认为内存地址 V 的值应该是 E,如果是,那就把它更新成 N。如果不是(说明在我检查后、更新前,有别的线程修改了它),那就算了,什么也别做,并告诉我操作失败了。”
整个“比较”和“交换”的过程是一条 CPU 指令,是不可中断的。
二、 CAS 在 ConcurrentHashMap 初始化哈希桶时的应用
让我们把这个原理应用到 ConcurrentHashMap 的 put 场景中。
假设一个线程(我们称之为 线程 A)要执行 put("myKey", "myValue")。
- 计算位置:
ConcurrentHashMap计算出"myKey"应该放在内部Node[] table数组的索引i处。 - 读取并检查:线程 A 读取
table[i]的值,发现它是null。太好了!一个空位。 - 乐观尝试:线程 A 不会立即加锁。它乐观地认为,在它把新节点放进去之前,不会有其他线程来捣乱。于是,它准备执行一个 CAS 操作。
此时,CAS 的三个参数是:
- V:
table[i]这个内存位置。 - E:
null(线程 A 期望这个位置现在仍然是null)。 - N: 一个新创建的
Node对象,它包含了"myKey"和"myValue"。
接下来,CPU 执行这个原子性的 CAS 指令。这里会出现两种结果:
场景 1:CAS 成功 (无竞争)
- 过程:
- CPU 读取
table[i]的当前值。 - 发现它的值确实是
null,与线程 A 的期望值 E (null) 相匹配。 - CPU 立刻将
table[i]的值更新为 N (新的Node对象)。 - CAS 操作返回
true(成功)。
- CPU 读取
- 结果:
put操作成功,并且全程没有使用任何锁。线程 A 可以直接返回。这是最高效的情况。
场景 2:CAS 失败 (发生竞争)
这是一个非常经典的并发场景,我们用两个线程来演示:
- 初始状态:
table[i]是null。 - 线程 A 计算出索引
i,检查发现table[i]是null。它准备执行CAS(table[i], null, nodeA)。 - 发生线程切换! 操作系统暂停了线程 A,开始执行 线程 B。
- 线程 B 也要
put一个同样会落在索引i的键。它也检查到table[i]是null,于是准备执行CAS(table[i], null, nodeB)。 - 线程 B 执行 CAS:CPU 读取
table[i],发现是null,和线程 B 的期望值匹配。于是,CPU 将table[i]更新为nodeB。线程 B 的 CAS 操作成功,它的put完成了。 - 再次线程切换! 操作系统换回线程 A 执行。
- 线程 A 执行 CAS:轮到线程 A 执行它准备好的
CAS(table[i], null, nodeA)了。- CPU 读取
table[i]的当前值。但此时,table[i]的值已经是nodeB了,不再是null。 - CPU 将这个实际值 (
nodeB) 与线程 A 的期望值 E (null) 进行比较。 - 比较失败! (
nodeB不等于null)。 - 因此,CPU 不会执行交换操作。
table[i]的值仍然是nodeB。 - CAS 操作返回
false(失败)。
- CPU 读取
- 结果:线程 A 的 CAS 尝试失败了。
ConcurrentHashMap的代码会捕捉到这个false返回值,并意识到:“我的乐观假设是错的,在我操作的期间,有别的线程已经占了这个位置。”
三、 CAS 失败后怎么办?
此时,线程 A 知道它不能再简单地尝试 CAS 了,因为 table[i] 已经不是 null 了。代码会进入一个自旋(Spin)循环,通常这个循环会做以下事情:
- 重新读取:重新读取
table[i]的值,现在它得到的是nodeB。 - 改变策略:线程 A 的任务目标从“在空位上放一个新节点”变成了“在一个已经存在的链表/红黑树上追加一个新节点”。
- 获取锁:要修改一个已经存在的链表,就必须防止其他线程也来修改。此时,
ConcurrentHashMap会退回到更传统的锁机制:使用synchronized关键字锁住table[i]的头节点(也就是nodeB)。 - 执行操作:在获得锁之后,线程 A 安全地遍历
nodeB开始的链表,并将自己的nodeA追加到链表的末尾。 - 释放锁。
总结
CAS 在这里的应用,体现了 ConcurrentHashMap 的一个核心设计哲学:乐观优先,失败后回退(Optimistic First, Fallback on Failure)。
- 优势:在绝大多数没有并发冲突的情况下,
put操作通过一次无锁的 CAS 就能完成,速度极快,避免了线程挂起和恢复的开销。 - 保障:在极少数发生并发冲突的情况下(CAS 失败),它能够检测到冲突,并安全地退回到使用
synchronized锁这种更“悲观”但绝对安全的方式来完成操作。
这种设计使得 ConcurrentHashMap 在不同并发烈度下都能表现出色。